CK3M and CK5M
Programmable Multi-Axis Controller
Multi-axis control with a fastest servo cycle time of 50 µs/5 axes enables precision machining
- Scalable Motion Controller CPU Range:
CK3M (1.0 GHz, 2 Cores), CK5M (1.6GHz, 4 cores) - Local axes for nanoscale precision
- Ultra high-speed synchronous control (50µs/5 axes)
- Custom servo regulation algorithms
- Flexibility on using multi-vendor actuators and encoders
- Flexible programming with G-code, ANSI C and PMAC Script languages
- EtherCAT for flexible configuration
- Standard TCP/IP Ethernet communication
- Open Protocols: MQTT publisher/subscriber and OPC-UA server, Ethernet IP Adapter and Modbus TCP Client/Server
- Modular design and DIN rail mounting
Specifications & ordering info
| Product | Type of module | CPU clock frequency | Max. number of axes via EtherCAT | Max. number of axis interface units | Amplifier interface | Encoder interface | Digital output type | Number of digital inputs | Number of digital outputs | Number of analog inputs | Description | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
CK3M Motion Control CPU | 1.0 GHz | 0 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, No EtherCAT. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 4 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, 4 EtherCAT axes. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 8 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, 8 EtherCAT axes. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
Analog I/O | 4 | CK3W Analog IN, 4 points, +/-10 V, 16 bit (full scale) |
|
||||||||
|
|
Analog I/O | 8 | CK3W Analog IN, 8 points, +/-10 V, 16 bit (full scale) |
|
||||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, Digital encoder, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, Digital encoder, DirectPWM, PNP |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, DA output (Filtered PWM), Pulse + direction or phase difference, Pulse encoder / Serial encoder, NPN Output type |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, DA output (Filtered PWM), Pulse + direction or phase difference, Pulse encoder / Serial encoder, PNP Output type |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, DA output (True DAC), Pulse + direction or phase difference, Pulse encoder / Serial encoder, NPN Output type |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, DA output (True DAC), Pulse + direction or phase difference, Pulse encoder / Serial encoder, PNP Output type |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | NPN | CK3W 4 Axis Interface Unit, Sinusoidal encoder, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | PNP | CK3W 4 Axis Interface Unit, Sinusoidal encoder, DirectPWM, PNP |
|
||||||
|
|
Encoder input | Not Applicable | Special Serial Protocol | Encoder Input Unit for CK3M, Serial encoder 4 channels, BiSS-C, Endat2.2, and R88M-1Lx/-1Mx Motor built-in encoder |
|
|||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, XY2-100 | Laser Interface Unit for CK3M, XY2-100 Protocol, Laser PWM output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, TCR, XY2-100 | Laser Interface Unit for CK3M, XY2-100 Protocol, Laser PWM output and TCR Output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100 | Laser Interface Unit for CK3M, SL2-100 Protocol, Laser PWM output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100, TCR | Laser Interface Unit for CK3M, SL2-100 Protocol, Laser PWM output and TCR Output |
|
||||||
|
|
Digital I/O | NPN | 16 | 16 | CK3W Digital IO, IN/OUT:16/16, NPN |
|
||||||
|
|
Digital I/O | PNP | 16 | 16 | CK3W Digital IO, IN/OUT:16/16, PNP |
|
Need assistance?
We’re here to help! Reach out, and our specialists will assist you in finding the best solution for your business.
Ota minuun yhteyttä CK3M and CK5M

Kiitos yhteydenotostasi. Otamme teihin yhteyttä mahdollisimman pian.
Meillä on teknisiä ongelmia. Emme ole pystyneet vastaanottamaan lomakettasi. Pahoittelemme ja pyydämme yrittämään uudelleen myöhemmin.
Tarjous CK3M and CK5M
Tällä lomakkeella voit pyytää tarjouksen valitsemastasi tuotteesta. Täytäthän kaikki *-merkityt kentät. Henkilökohtaisia tietojasi käsitellään luottamuksellisesti.
Kiitos tarjouspyynnöstä. Toimitamme tarvittavat tiedot teille mahdollisimman pian.
Meillä on teknisiä ongelmia. Emme ole pystyneet vastaanottamaan lomakettasi. Pahoittelemme ja pyydämme yrittämään uudelleen myöhemmin.
Features

Modular design
The modular design allows you to freely combine the CK3M or CK5M.
CK3M vs. CK5M
Both CK3M and CK5M are advanced motion controllers with identical functionality. The key difference lies in their core processors: CK3M features a 1.0 GHz dual-core processor, while CK5M is equipped with a more powerful 1.6 GHz quad-core processor.
| Max. Local axes | Max. Ethercat axes | |
|---|---|---|
| CK3M | 16 | 8 |
| CK5M | 32 | 32 |
Power PMAC IDE (Integrated Development Environment)
- Based on Microsoft® Visual Studio®
- G-code, ANSI C and PMAC Script languages
- Easy tuning
- Simple setting
- Troubleshooting
- Debugger
Complex kinematics
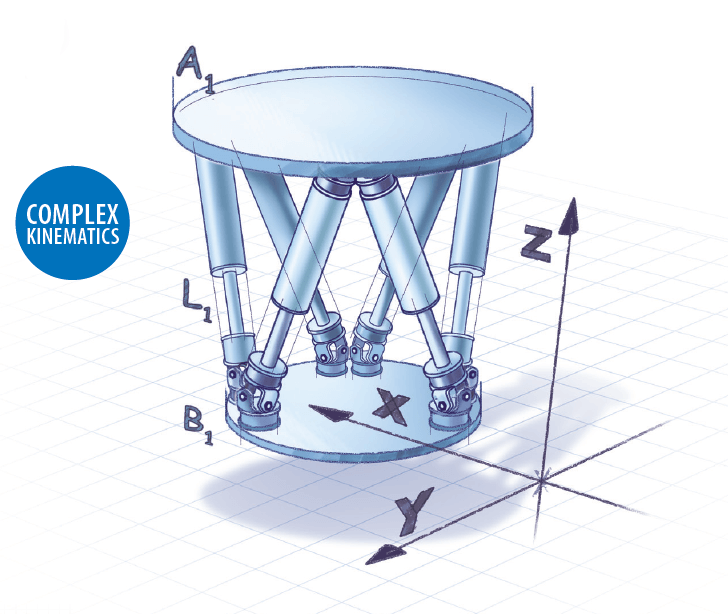
Complex mechanics can be controlled thanks to the matrix handling and the space conversion. Special applications like Hexapod telescope mirror positioning, can be easily operated by the kinematics handling functionality.
Leveraging features for accurate machining application
G-Code
Standard RS-274 G-Code interpreter. User-writable subroutines for customized implementation of G, M, T and D-codes. Flexibility to adapt the syntax and to work in combination with any CAD/CAM software.
Cutter compensation 2D/3D
Tool diameter and shape compensation, matching the cutting point exactly as specified in G-Code.
Fast processor + large program buffer
Fast processor can handle over 10,000 blocks per second and up to 1Gb part programs.
Block Retrace for reversing the path
Path can be reverted in order to remove the tool from cutting area.
Advanced Block Lookahead
Instructions in the buffer are analyzed in advance, movements are blended and optimized in speed and acceleration for a better performance.
Tangent tool management
Tools with a cutting direction require a tangent path positioning.
Software
Power PMAC IDE
This computer software is used to configure, create user programs, and debug the programs for the NY51-A, CK3E and CK3M Programmable Multi Axis Controllers.
Related products
-

Sysmac general purpose servo
-

Precision Control for a Wide Range of Motor Applications
-

CK3E Programmable Multi Axis Controller
-

Modular IP20 IOs
Downloads









_getting_started_guide_en.jpg)